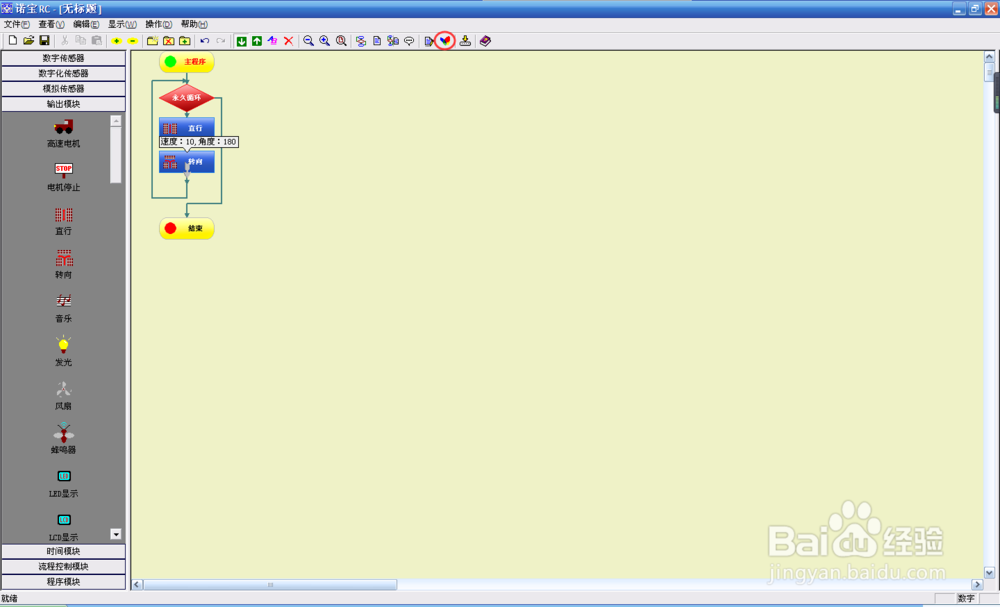
1、首先要点击“流程控制模块”中的“永久循环”,这样机器人除了没电以外就不会停止运动。

2、然后添加“输出模块”中的直行和转向,让机器会行走并转身。

3、双击“直行”程序,设置好移动速度的时间,然后点击确定。

4、双击“转向”程序,设置转动角度为180度,速度可任意调整,但要注意左右转向。

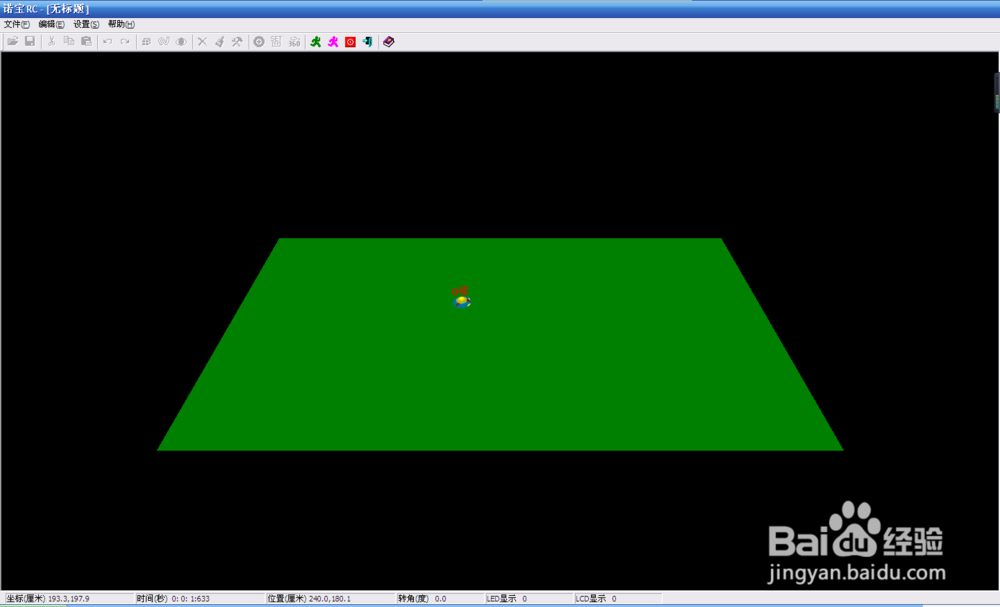
5、然后点击仿真按钮,进入仿真页面。

6、点击“仿真”或“3D仿真”即可测试机器人移动了。

1、方法和来回直行一样,只需用双击“转向”程序,将转动角度修改为90度即可。

1、和上面依旧相同,不过要如图再添加一次“直行”和“转向”。“转向”的转动角度都是90度。

2、两个“直行”程序的直行时间就可任意调整,但不相同,它们的数值分别是长方形的长和宽。

1、如果要放到实体机器人上,组装好机器人并安装好程序就可以啦~
2、如果此经验对你有用,记得要投票并分享哦!

