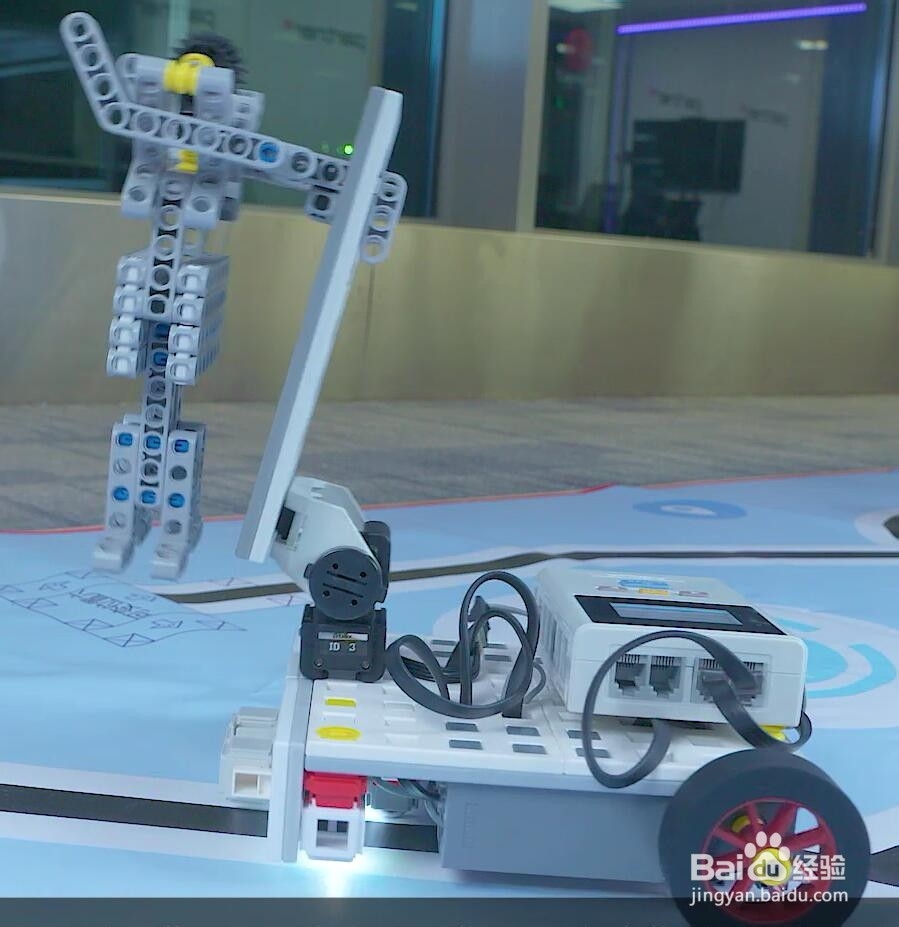
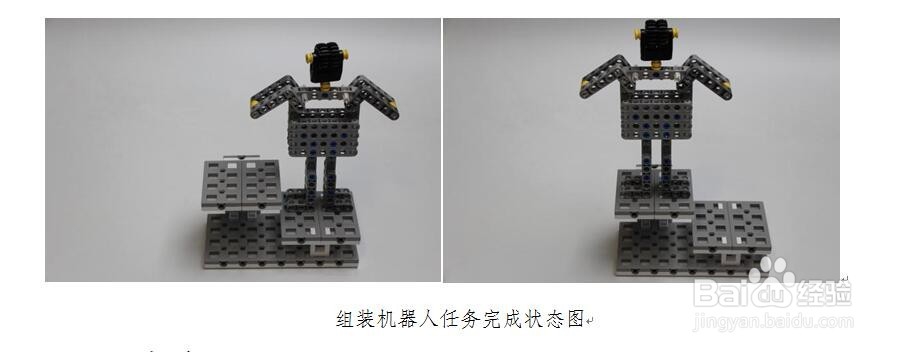
1、初始状态:
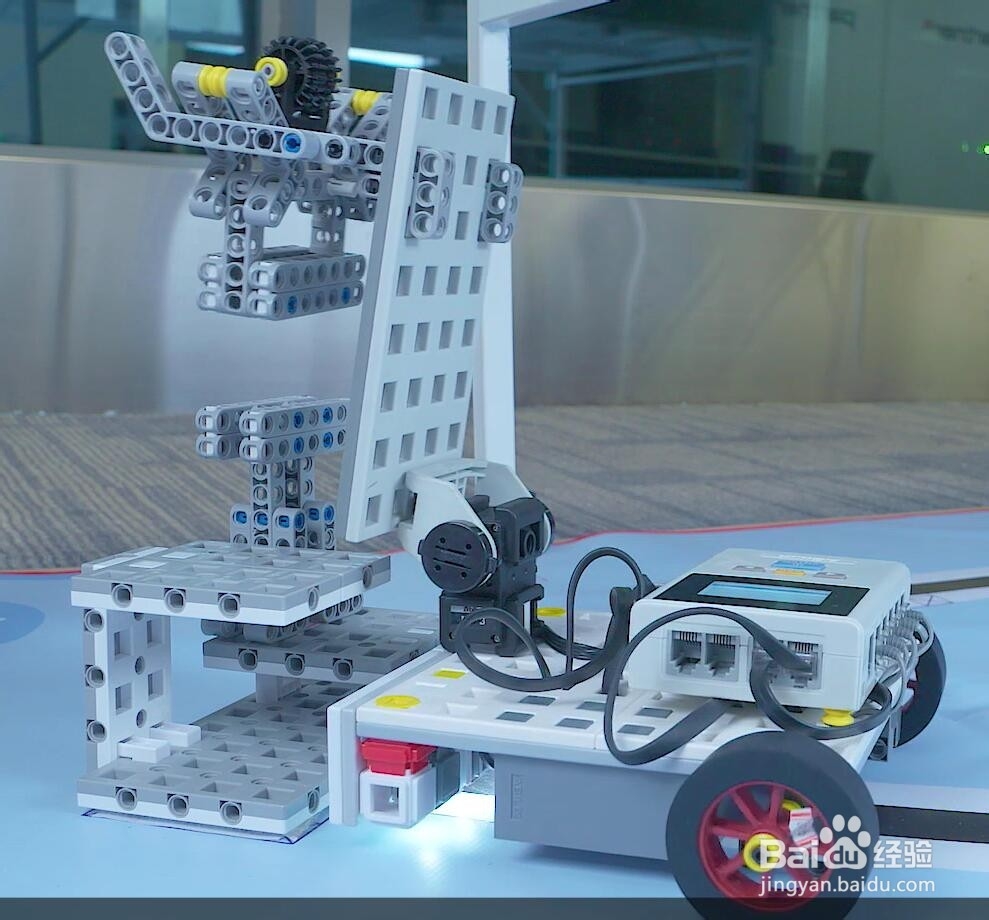
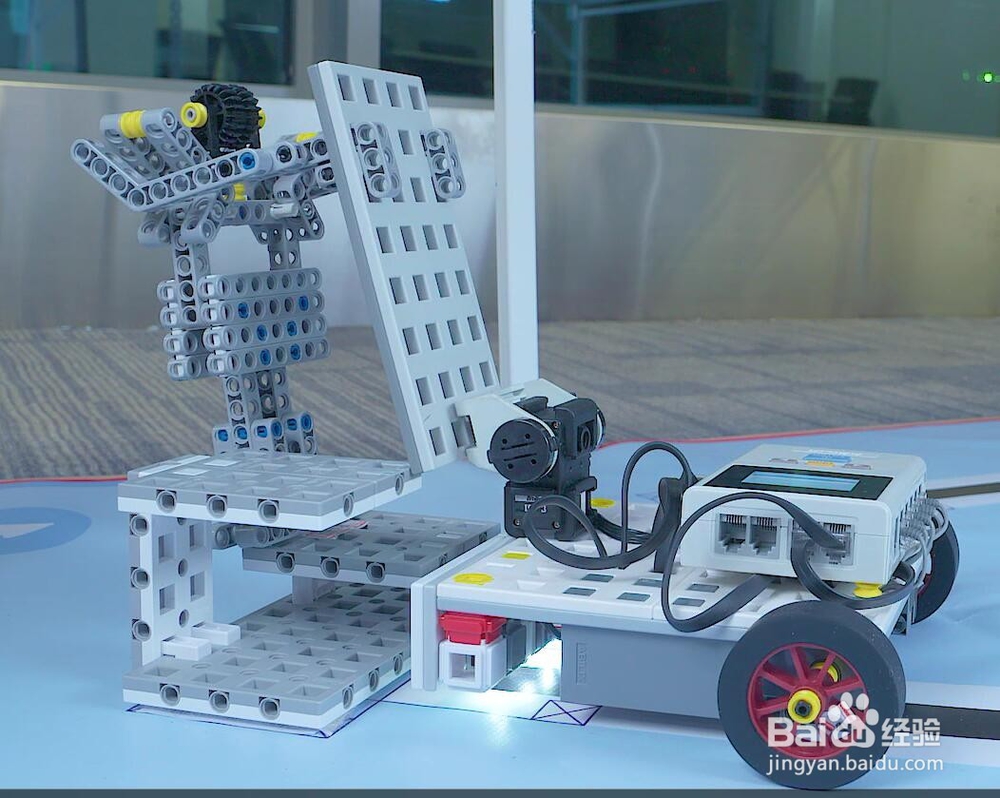
机器人模型固定在场地上,机器人的控制核心和移动底盘,处于分离的状态。

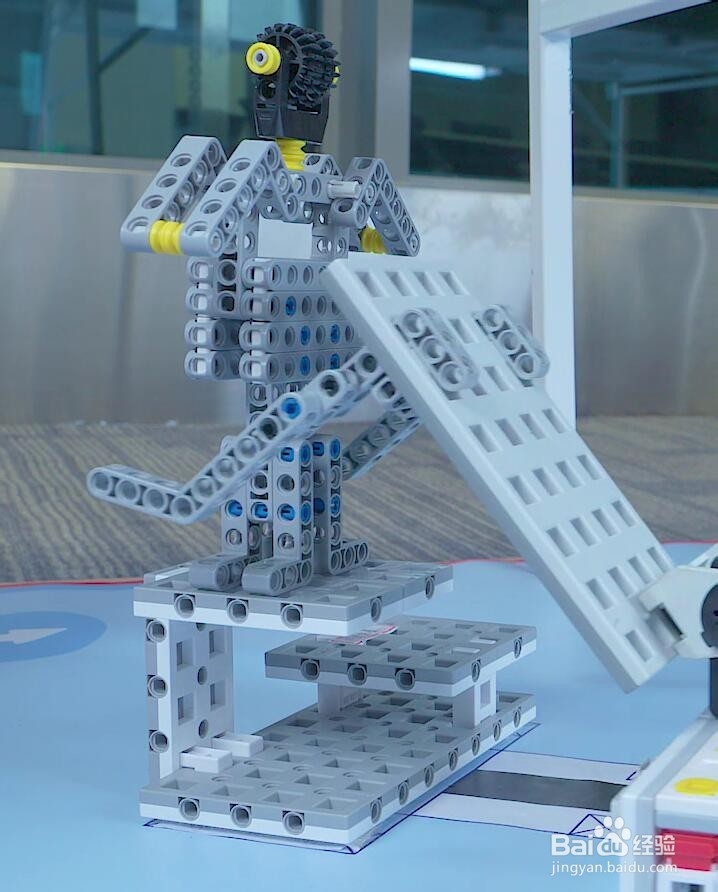
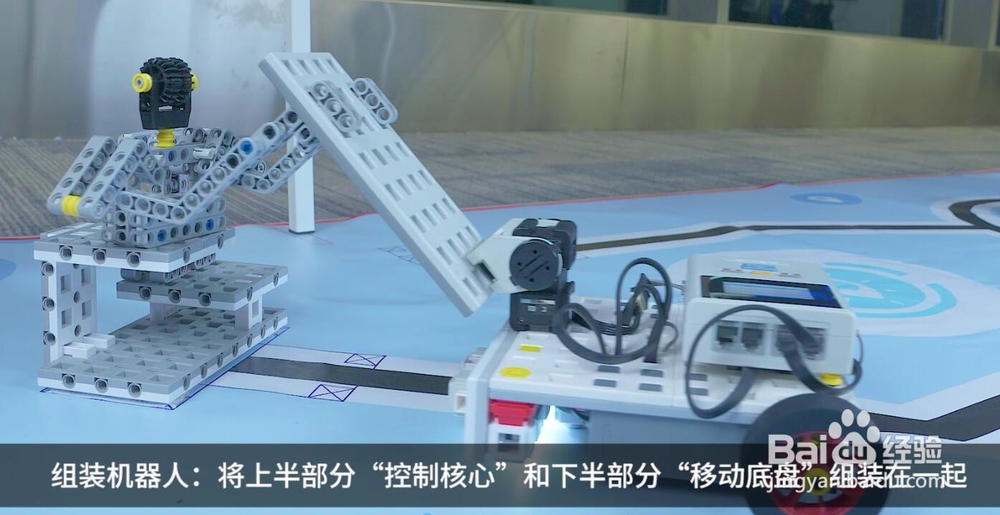
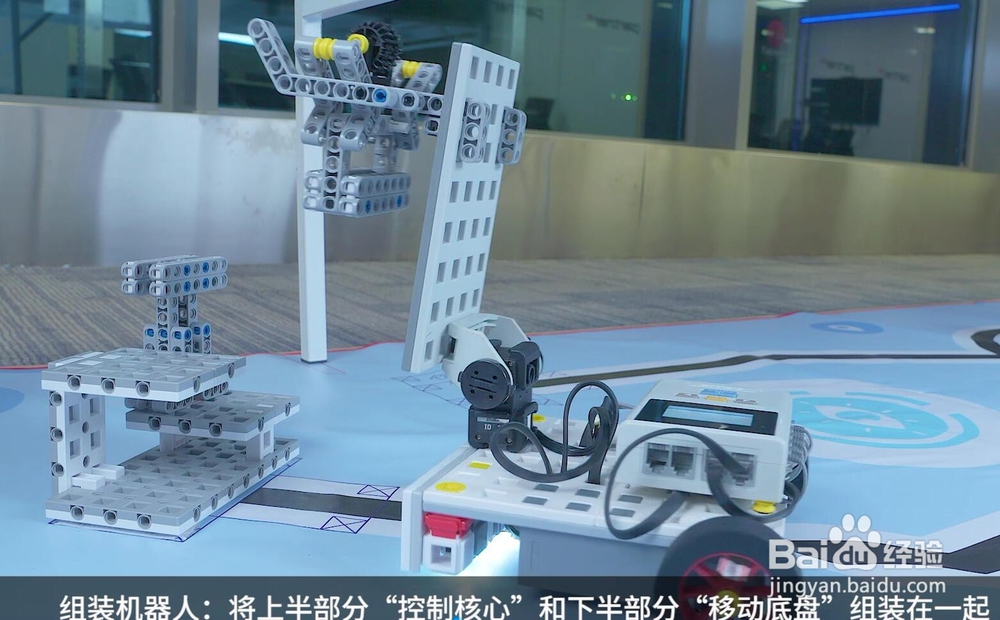
2、将组装机器人模型的上半部分“控制核心”和下半部分“移动底盘”组装在一起。
当组装机器人的模型位于一层操作台到比赛结束,得40分;
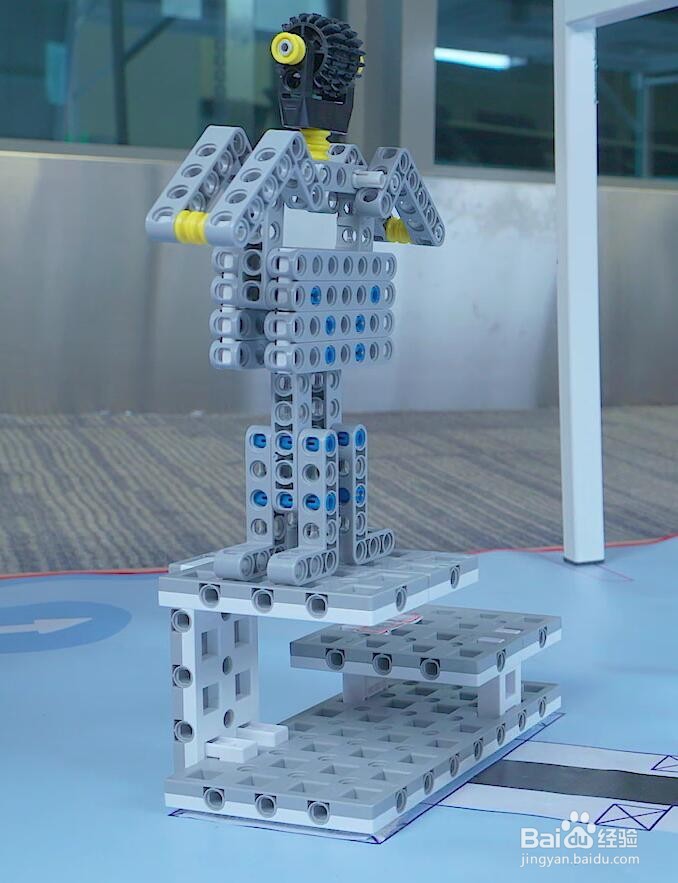
当组装机器人的模型位于二层操作台到比赛结束,得60分。
3、小车行走路线图,如图中标出的红色线路所示。
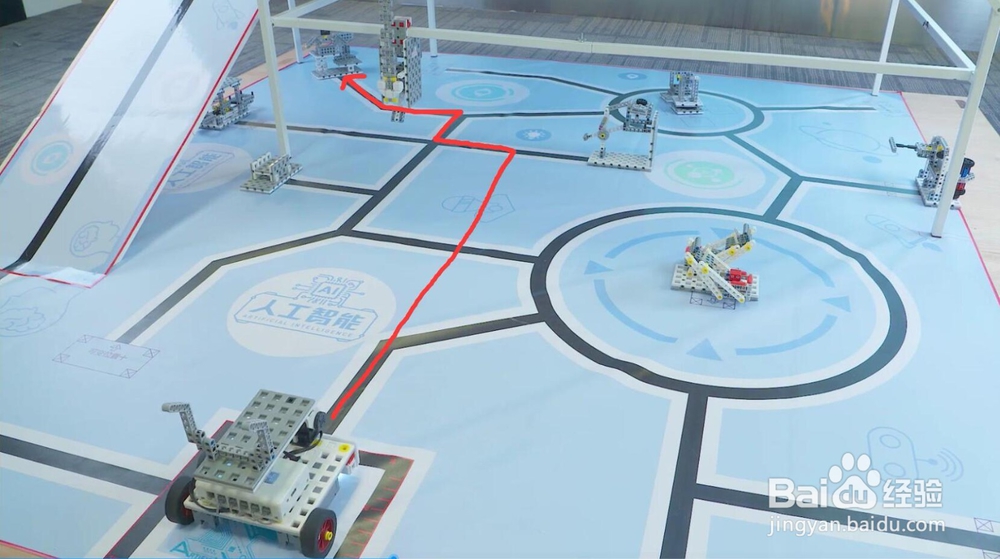
4、小车从基地冲出,一直到图中所示位置,停下。

5、左转后,巡线到路口处,右转。如图所示。



6、再巡线到下一个路口处,左转,然后,一直巡线,到目的地位置。小车行走路线,如图所示。



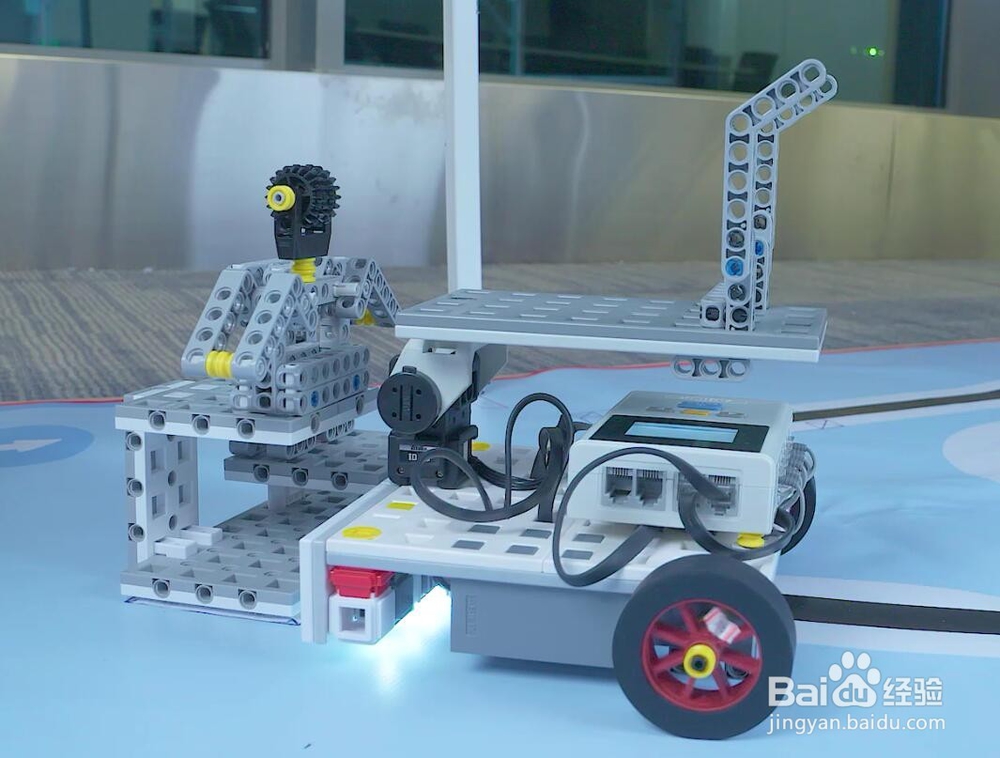
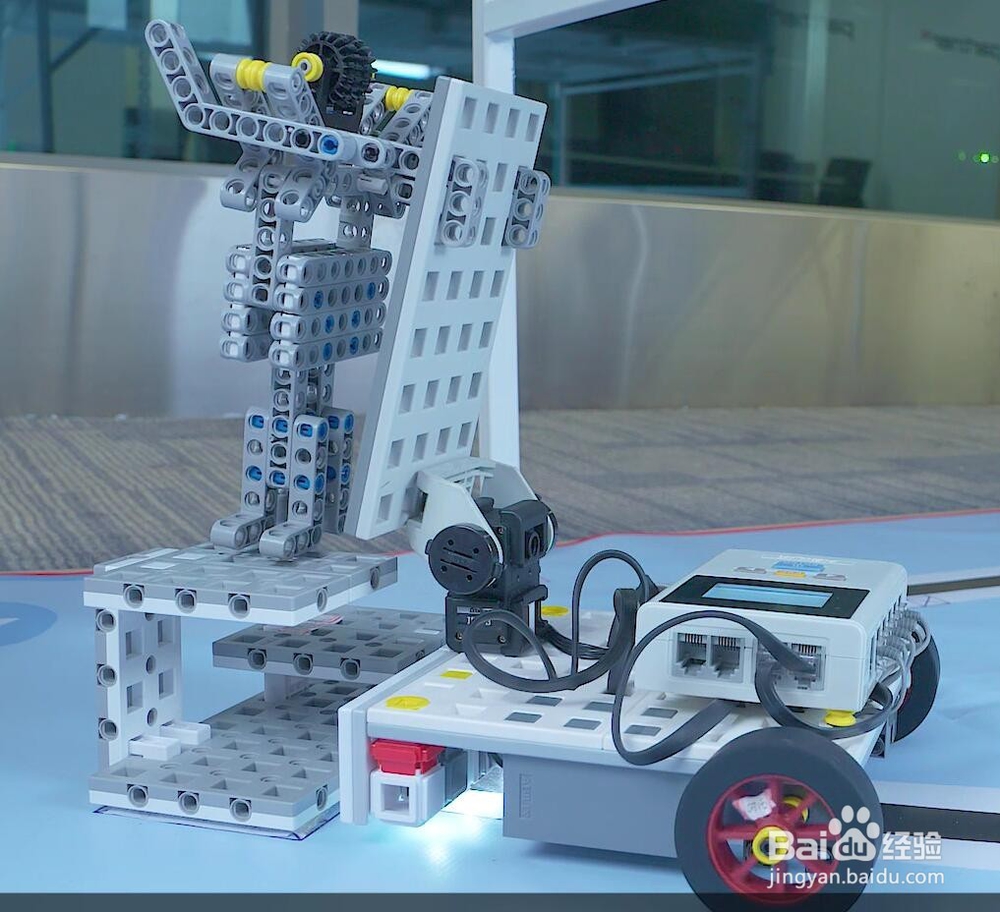
7、小车后退一段距离,控制舵机放下模块(如同手臂),再前进一段距离,将机器人的上半部分,抱起来。
8、小车向右方,挪动一点距离,将机器人的上半身,放到它的下半身上。至此,可以得到40分。
9、将机器人抱起来后,再将它放到高平台上。就可以得到60分。